



Quadcopter FX Simulator



Perihal Quadcopter FX Simulator
A Quadcopter / Multirotor RC Drone simulator with First Person View (FPV), HUD, Return Home, Course Lock, Home Lock, Camera Gimbal, Acro mode, Acro 3D mode and more..
Now Google Cardboard VR is also supported for immersive flying and FPV experience.
Support for Controllers
Please note that this a simulator and Not a game. It is designed for RC enthusiasts to practice Flying skills.
Basic Tutorial for beginner is in the above description video.
Minimum Screen resolution required is 800 x 480 px. Minimum Recommended RAM is 1 GB. We are open to suggestions and problems. You can always email us at our support email.
Features:
1) Based on real physics Model of Quadcopter
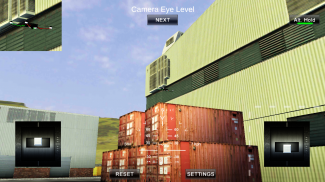
2) Interactive selection of different cameras modes:
* Eye level Camera
* First Person View Camera
* Stabilized Gimbal Camera
* Follow Camera
You can walk around while flying, looking at the quad either by dragging the middle of screen or by enabling accelerometer button on the left side in the Eye level Camera Mode..
3) Return to Location (RTL)
When on the Quad will automatically Return and Land back in its Landing Position. It will Automatically switch on when the Quad goes out of range.
4) Position Hold
When ON the Quad will try to Hold its position when both control sticks are released.
5) Course Lock
When ON the Forward, Backward, Left and Right will remain same regardless of orientation of Quad. e.g. Moving Right stick Forward will always make the Quad go forward in East Direction even if its pointing towards north.
6) Home Lock
When ON the Forward will always be Away from you and Backwards will always be towards you regardless of Quads Orientation.
7) Heads up Display(HUD)
Displaying real-time Pitch, Roll, Heading, Altitude and Speed.
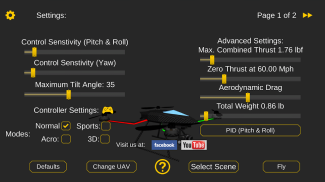
8) Adjustable Control sensitivity Settings
9) Auto Stabilizing adjustable
10) Altitude Hold Switch
If ON the quad will try to maintain the altitude when it was switched on.
11) Advanced Settings
If enabled users can change the Total Weight, Static / Dynamic thrust, PID setting and Aerodynamic Drag values.
12) Multiple Quad / Scene Selection / Some basic Challenges for Time Pass..
13) Multiple mode Input Support.
Now it supports mode1, mode2. mode3, mode4 and accelerometers. You can change via settings page
14) Camera rotation in FPV and Gimbal camera.
Click and Drag from center of screen on FPV or Gimbal camera. Double click in center to reset.
15) Dynamic Wind
Wind effect will reduce when behind the building.
16) Google cardboard Support for immersive virtual reality and FPV experience.
Make sure that you have a controller attached to the device because the only way you can control the quadcopter is by controller once the Cardboard VR is enabled. After enabling you have to gaze at the buttons on the UI and press the trigger button on the cardboard to click it. Once you are flying then pressing the trigger anywhere will open the settings page. You can also touch on screen anywhere to execute trigger event instead of pressing the trigger button.
17) Max Tilt Angle / Auto Stabilize Sensitivity Slider
In Normal Mode the slider changes the Maximum Tilt angle setting. This settings determines the maximum roll / pitch angle the quadcopter will tilt. In Sports Mode it changes the Auto Stabilize sensitivity. The higher the settings the more force is applied to stabilize the quadcopter.
18) Acro / Acro 3d mode for expert flying
Auto stabilize will not be applied in these modes. You need to be expert to fly in this mode.In 3D Mode is mode in which the Quadcopter can fly upside down also. The throttle sticks will produce reverse thrust when moved down from the center position.
Enjoy Flying..
Credits: Some Arteria content is in use.
</div> <div jsname="WJz9Hc" style="display:none">A simulator Quadcopter / Multirotor RC berdengung dengan Orang Pertama View (FPV), HUD, Pulang, Kursus Lock, Rumah Lock, Camera gimbal, mod Acro, mod Acro 3D dan lagi ..
Kini Google kadbod VR juga disokong untuk terbang mendalam dan pengalaman FPV.
Sokongan untuk Pengawal
Sila ambil perhatian bahawa simulator dan Bukan permainan ini. Ia direka untuk peminat RC untuk mengamalkan kemahiran Penerbangan.
Tutorial asas untuk pemula adalah dalam huraian video di atas.
Resolusi skrin minimum yang diperlukan adalah 800 x 480 px. RAM disyorkan minimum adalah 1 GB. Kami terbuka kepada cadangan dan masalah. Anda boleh menghantar e-mel kepada kami di e-mel sokongan kami.
Ciri-Ciri:
1) Berdasarkan Model fizik sebenar Quadcopter
2) pilihan Interaktif kamera mod yang berbeza:
* Tahap Mata Camera
* Orang Pertama View Camera
* Stabil Camera gimbal
* Ikut Camera
Anda boleh berjalan-jalan semasa terbang, melihat quad sama ada dengan menyeret tengah-tengah skrin atau dengan membolehkan pecutan butang di sebelah kiri dalam Mod tahap Camera Mata ..
3) Kembali ke Lokasi (RTL)
Apabila di Quad akan secara automatik Kembali dan Tanah kembali Jawatan Landing itu. Ia secara automatik akan menghidupkan apabila Quad keluar dari julat.
4) Posisi Pegang
Apabila ON Quad akan cuba Pegang kedudukannya apabila kedua-dua batang kawalan dilepaskan.
5) Kursus Lock
Apabila ON Serangan, ke belakang, kiri dan kanan akan tetap sama tanpa mengira orientasi Quad. cth Melangkah batang Hak Forward akan sentiasa membuat Quad pergi ke hadapan dalam Arah Timur walaupun menghala ke arah utara.
6) Laman Utama Lock
Apabila ON Forward akan sentiasa Jauh dari anda dan ke belakang akan sentiasa ke arah anda tanpa mengira quads Orientasi.
7) Heads up Display (HUD)
Memaparkan masa nyata Pitch, Roll, Tajuk, Ketinggian dan cepat.
8) Tetapan kepekaan Kawalan laras
9) Auto pemantapan laras
10) Tukar Ketinggian Hold
Jika ON quad akan cuba untuk mengekalkan ketinggian apabila ia dihidupkan.
11) Tetapan Lanjutan
Jika pengguna yang aktif boleh menukar Jumlah Berat, teras Statik / Dinamik, tetapan PID dan nilai Seret aerodinamik.
12) Berbilang Pemilihan Quad / Scene / Beberapa Cabaran asas untuk Masa Pas ..
13) Berbilang Sokongan mod Input.
Sekarang ia menyokong mode1, mode2. mode3, mode4 dan pecutan. Anda boleh menukar melalui halaman tetapan
14) putaran Camera di FPV dan kamera gimbal.
Klik dan Seret dari tengah skrin di FPV atau kamera gimbal. Klik dua kali di pusat untuk menetapkan semula.
15) Angin Dinamik
Kesan angin akan mengurangkan apabila di belakang bangunan.
16) Google kadbod Sokongan untuk realiti maya mendalam dan pengalaman FPV.
Pastikan bahawa anda mempunyai pengawal dipasangkan kepada peranti ini kerana satu-satunya cara anda boleh mengawal quadcopter adalah dengan pengawal apabila kadbod VR didayakan. Selepas membolehkan anda perlu menatap butang pada UI dan tekan butang picu pada kadbod untuk klik. Sebaik sahaja anda terbang kemudian menekan picu mana-mana sahaja akan membuka halaman tetapan. Anda juga boleh menyentuh mana-mana sahaja pada skrin untuk melaksanakan pencetus peristiwa bukannya menekan butang picu.
17) Max Tilt Sudut / Auto Menstabilkan Kepekaan Slider
Dalam Mod Normal gelangsar mengubah tetapan sudut Tilt maksimum. Tetapan ini menentukan sudut roll / padang maksimum quadcopter akan sengetkan. Dalam Mod Sukan ia menukar Auto Menstabilkan sensitiviti. Semakin tinggi tetapan kuasa yang lebih digunakan untuk menstabilkan quadcopter itu.
18) Mod Acro / Acro 3d untuk terbang pakar
Auto menstabilkan tidak akan digunakan dalam mod ini. Anda perlu menjadi pakar untuk terbang dalam Mod ini 3D mode.In adalah mod di mana Quadcopter boleh terbang terbalik juga. Kayu throttle akan menghasilkan teras terbalik apabila bergerak turun dari kedudukan tengah.
Nikmati Flying ..
Kredit: Sesetengah kandungan Arteria sedang digunakan.</div> <div class="show-more-end">
Quadcopter FX Simulator - Versi 1.75c
(23-08-2019)

Quadcopter FX Simulator - Maklumat APK
Versi APK: 1.75cPakej: com.Creativeworld.QuadcopterFXVersi Terkini Quadcopter FX Simulator














Aplikasi dalam kategori sama

Anda juga mungkin suka...







